Introduction
I saw this little thing and was immediately transfixed. I loved the organic nature of how it moved, it looked like an artificial muscle. The very idea of this strange little structure felt unique to computational fabrication, performing tasks that had been done before (moving, grabbing), but taking to it from a completely different direction, drawing inspiration for the structure and motion of organisms and creating a singular object that functioned as a complete system.
That pretty much stuck in my head for the rest of the semester. I wanted to create a moving object that didn’t rely on hinges and gears to function. However, I don’t have any experience in physical materials, and wanted to really feel it out myself without relying too much on guides and similar builds. So I mostly focused on prototyping and experimentation, and tried to see what I could learn by just taking it from the ground up. Rather than the multi-functional plastic organism I was inspired by, I narrowed the scope to something simple and functional I believed I could complete in the time I was allotted. I decided on a claw, a thing that can grab stuff. That way I could focus on just a single motion and a single function. And I am pretty happy with how that turned out.
Background Research
PneuMesh (Academic Paper)
By Jianzhe Gu, Yuyu Lin, Qiang Cui, Xiaoqian Li, Jiaji Li, Lingyun Sun, Fangtian Ying Guanyun Wang, Lining Yao
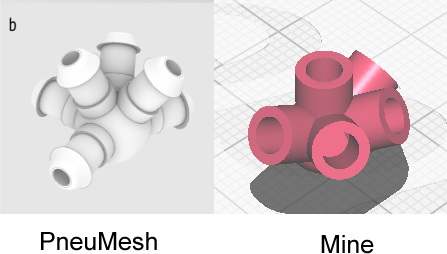
Beyond the surface level awesomeness of the structures they were able to generate, PneuMesh is actually a whole simulation tool you can check out here. The focus of the research had been about experimenting with the flexibility of truss-based shape-changing leveraging the flexibility of the triangular support system to perform various transformation on the overall form allowing it to do all sorts of stuff like walk. The system also works to minimize the number of controls necessary when moving the structure, combining channels to retain functionality while simplifying execution.
This project is the most explicit inspiration for my project, it’s literally the reason I wanted to do it. Furthermore much of how I went about designing and fabricating my claw was also based on their designs, namely the use of modular pieces and the truss based structure. Unfortunately I never used the simulator they designed, I was too unfamiliar with the territory and wanted to focus on physical prototypes which would help me get a feel for the structure easier.
FRESH-Printing (Academic Paper)
By Avery S. Williamson, Wenhuan Sun, Ravesh Sukhnandan, Brian Coffin,
Carmel Majidi , Adam Feinberg, Lining Yao,
and Victoria A. Webster-Wood
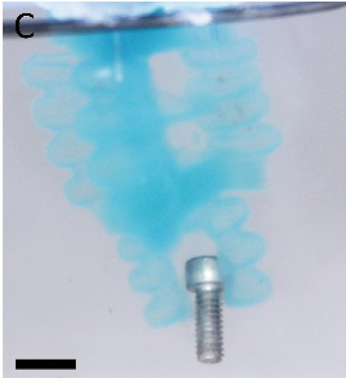
Born from a really fascinating problem, FRESH-Printing was first and foremost a project focused what you were using to print as much as what you made. Designed for use in aquatic environments, FRESH-Printing is made of biodegradable edible material as to make sure that working with in the wild does not interfere with wildlife should it be lost, eaten, or simply interacted with. The design however presented unique problems, as the non-harmful material isn’t very sturdy and requires further new methods of articulation that would be compatible with the softer material. It uses an internal series of canals filled with liquid to power the actuators at it’s base allowing it to move the robots hand.
While the initial inspiration for the project was the PneuMesh, the FRESH-Printing sort of took over questions of form and function. PneuMesh was a pretty high concept exploration of flexible bodies, demonstrating stuff like animal locomotion. While cool I didn’t think I had the time or skill to pull that off. So I ended up using something more based off the simple functional design of the FRESH-Printing claw and it shaped my final product into a sort of dredging claw, something you’d use to secure objects, at the bottom of a lake or something similar.
Foamcore CNC Machine (Crazy College Project)
By Ilan E. Moyer

Ilan Moyer showed us a lot of cool things when he was the guest speaker for class and while all the professional products were very impressive, nothing was as cool to me as this $90 3D printer he built out of Foamcore and a handful of machine parts. While attending a Maker Faire in Austin, Texas he was inspired by innovative functional designs people with no formal training in engineering were able to create. So he took it upon himself to see how low tech he could get will still building a working machine. A quote from his documentation I really appreciated was “Many of their design choices would have likely been instantly overlooked otherwise… and yet, their machines worked and were capable of producing useful objects. … Armed with an exacto knife, a hot glue gun, and around $90 worth of materials, I spent a weekend designing and building and never touching a sketchbook or solid modeling program.” It printed using chocolate pudding, it was amazing.
I had already proposed my project by the time Illan spoke at our class but the ethos behind this silly weekend experiment resonated with me greatly. The informal experimental nature he took when creating his foamcore printer is pretty much the same ethos I tried to take into making my claw, only I didn’t have years of engineering experience the way he did. But to be fair I didn’t build a printer. But his design still inspired me and I thought a lot about how I could do something similar.
Process
Material Testing
The first thing I needed was a flexible material. PLA, the stuff we normally use, is incredibly rigid and brittle and would not work as the basis for the flexible structure I was going to design. At the advisement of the teacher I tried out TPU, a much more flexible rubbery substance. I ended up having to give a fair amount of time to testing it because the material was really problematic. Flow was inconsistent, it constantly jammed, and the flexibility meant it often deformed mid print just due to the motion of the head. It was the first time I had to experiment with printer settings and I ended up finding some settings online (here) that helped quite a lot such as slowing feed rate, disabling retraction, and other setting tweaks that helped the flexible material print easier. By the end I was able to print with it consistently, and I only ruined 1 printer nozzle and a needle to figure it out.
Building Blocks
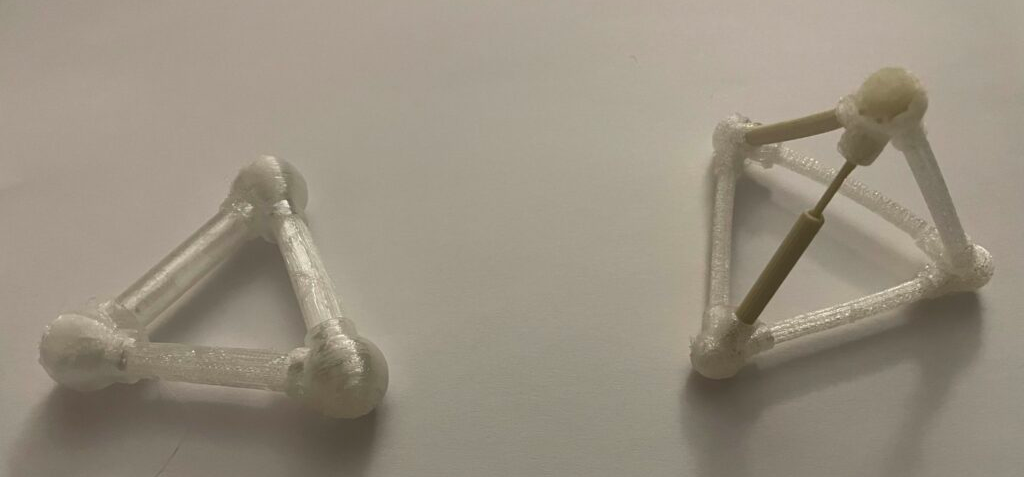
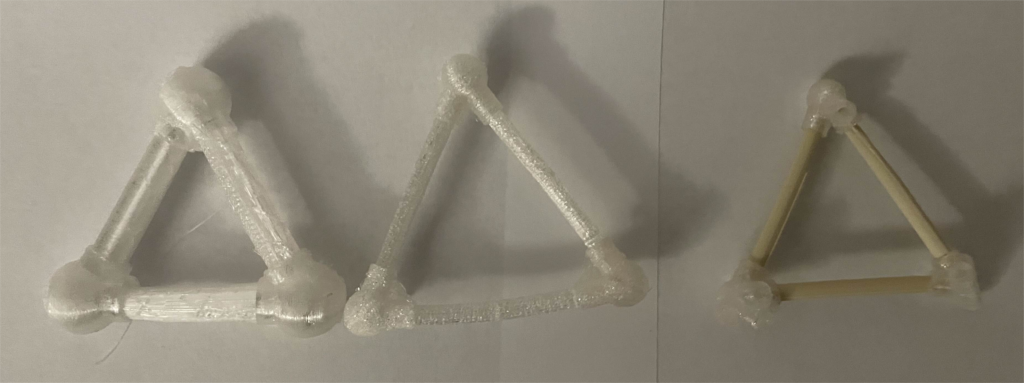
After I got comfortable printing with TPU I had to prototype construction. Very early on I gravitated towards the modular design demonstrated in PneuMesh. Individual pieces cut down on printing error, meaning messed up prints would waste minutes of work instead of hours. So I began experimenting with scale and structure. I opted for a simpler but similar structure to the one used by PneuMesh with these modular connectors that would connected all off the supports.
A cool thing I discovered at this point was that the extra flexibility of the TPU meant you could get a more flush fit when slotting pieces and if the fit was tight enough, it would actually hold itself together with only tension.
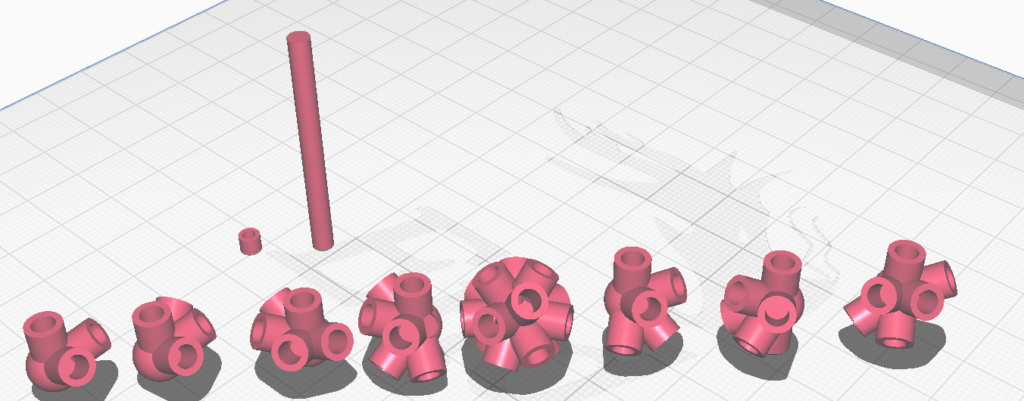
Code
The lions share of computation on this assignment was in the prototyping. So I wanted the code to be simple and mostly just for iterating forms. All it does is make joints and pillars of various sizes.
Flexibility and Hardness
For a long while I had hoped to just make this entire structure out of TPU. TPU was flexible, I was building a flexible structure, it all made lots of sense. However as I was prototyping and especially as I was starting to test collapsable segments I discovered that TPU was too soft. It was so soft it just wouldn’t return to it’s original shape after collapsing. Because of this I tinkered with it for a while trying various densities to see if I could get it to bounce back properly. Eventually I realize it might be better to use PLA for the connective pillars specifically. The joints still needed to be flexible but by using PLA as the connective pillars it made the structure much more rigid meaning it was much better at returning to it’s original shape when you released pressure on it.
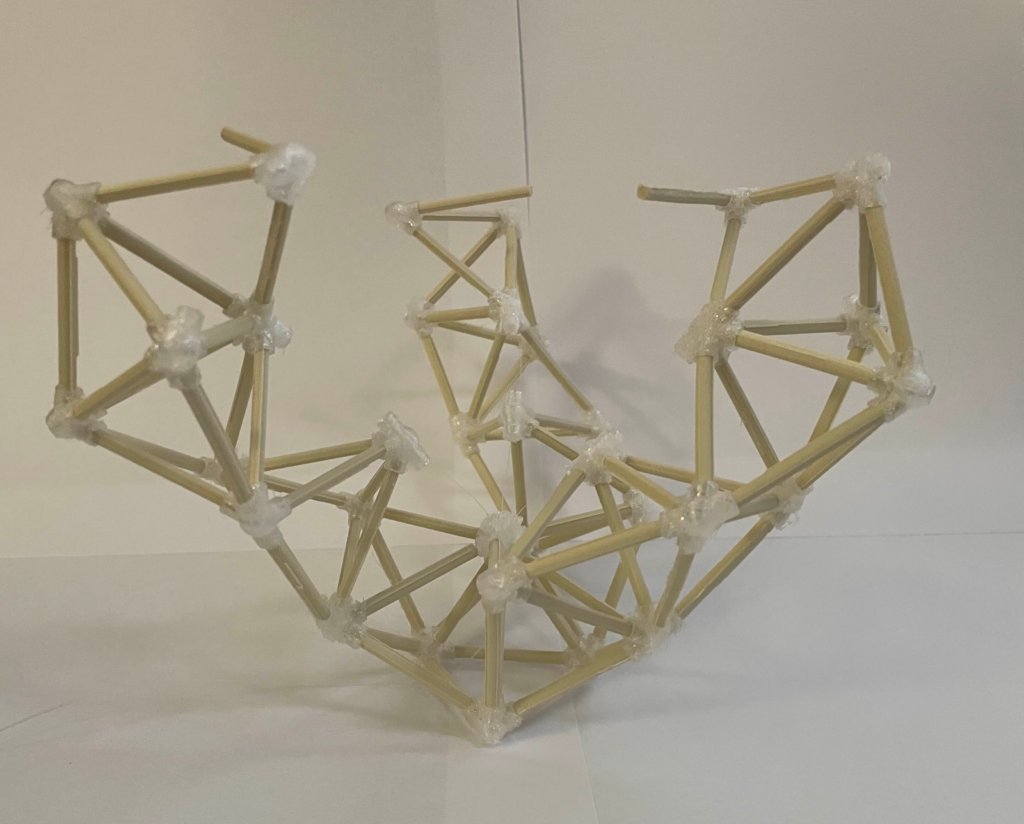
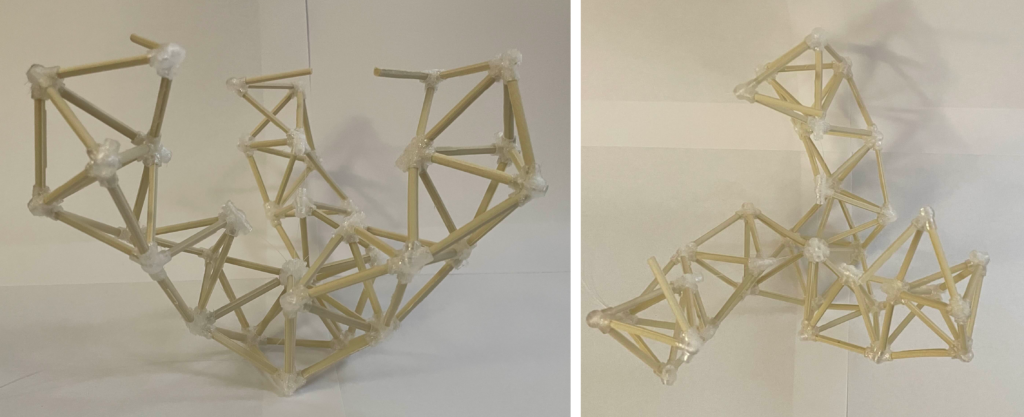
The Final Form
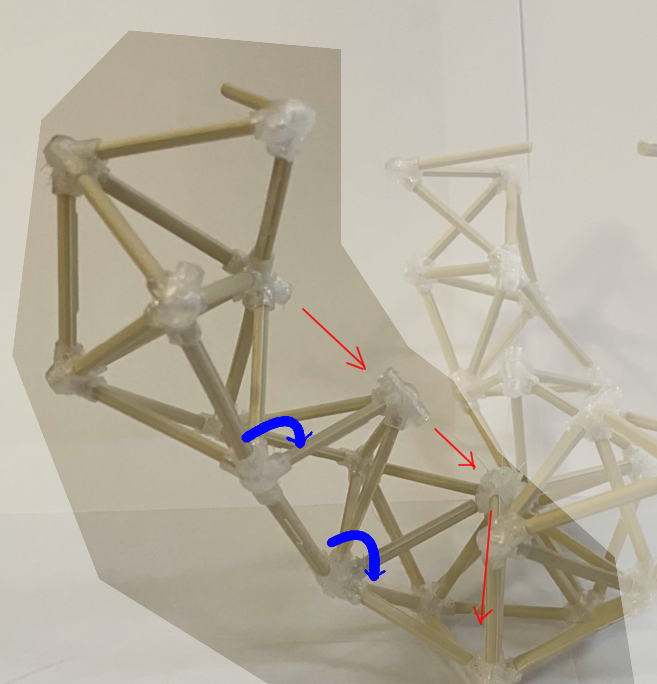
Apologies for the diagram, couldn’t think of a better way to demonstrate. So the form is trying to be as simple as possible, it’s the closest to a straight line I could get the collapsible segments of a triangular 3D shape. The way the structure works is a length of fishing line is anchored on one end by a bit of TPU lodged in the joint, it then threaded through the path demonstrated by the red arrows, down the arm and out the base of the claw. Doing this the causes the joints highlighted in blue to distort bending inward and closing the grip of the claw. The structure is rigid enough that once you release pressure it begins to right itself and open up fully again.
At this point I realized I couldn’t hold the structure together with friction alone. Much of the base had to be glued together otherwise the same amount of pressure that would distort the overall shape was also enough to cause pillars to slip out of their sockets. But when stationary it was completely self supporting.
Manufacturing
Now with all the structure and material ironed out I got to printing. This did not go well. My 3-D printer repeatedly gave me inconsistent prints, some worked, some deformed, some completely failed to print. I do not understand how a machine designed to do the same thing over and over again produces inconsistent results. The piece total on this one was pretty intense sitting at about 115 individual prints all said and done. I tried printing pieces in batches, this didn’t work. The way the printer decided to path the batch led to sharp jerks that left deformities in each of the copies. So I just printing them one at a time. This also didn’t work. Finally I discovered the existence of something called brim, a thin layer of filament at the base of the print which holds it all together as its printing. This magical structure is a life saver and from this point on prints were consistent.
Grabbing
Originally the fingers on the claw just had pointy little pokers. It wasn’t until I’d actually put it together that I realized that the pokers were quite bad at grabbing things, especiall rigid materials that they struggled to latch onto and often just pushed away. I ended up with these weird little stick paddles, highlighted by the red arrow, that served as a longer edge for stuff to stag on and that was much better at getting a hold on objects.
Outcome
The Tally
- 81 PLA “Bones”
- 34 TPU Joints
- 9 Joint Variants
- 32 STL Files Made (10 Used in final product)
- 1 Roll of Fishing Line
- 2 Thread Needles (I broke one trying to thread the fishing line)
- 18 Hours of Printing (Final Product Only)
It stands at 8 inches wide and 6 inches tall. The claw is operated by a single pull string at the bottom which collapses the structure. When released the claw opens up into its resting position. As hoped for it has no hinges, gears, or normal forms of motion, it merely flexes under pressure and returns back to it’s normal shape when released.
In terms of grabbing ability, the opening is about 4 inches in diameter and it is made of plastic and string so it can only hold pretty small household objects. Which does include a cup full of pencils.

The original deliverable pitch was as follows: “One flexible claw… pretty large, maybe a foot long, and I would like it to be able to hold some amount of weight (like at least a cup or similar).” Overall I would say this was a mission success.
Outtakes
You may have noticed these little piston structures in the prototype images that weren’t shown in the final print. Those were meant to be collapsible pillars that had string threaded through them that would fold up when when the structure flexed. I had the idea all the way back when it was going to be all TPU, then these were going to be PLA. But ultimately they were scrapped from the final design for the following reasons.
3-D Printing breaks down at scales this thin, it was a hollow tube that housed a second smaller hollow tube. The filament frayed at the edges and it was extraordinarily fragile. Ultimately they were more trouble than they were worth, plush removing them added extra room in the claws interior which was already cramped.
Future Work
Advanced Design
Another interesting thing that happened as I was designing was that I progressively made the structure smaller as I was prototyping. This was on purpose. After looking at Ilan Moyer’s 3-D printer I had the idea of making effectively an arcade claw machine setup utilizing the claw I was building.
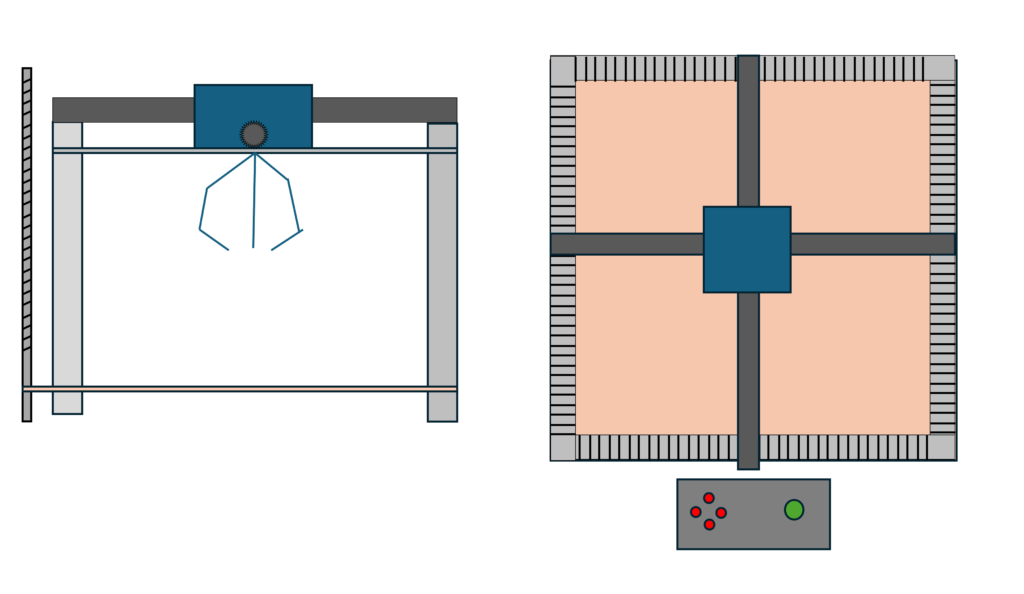
It’s only a preliminary sketch but the concept was as follows. It would have a similar four pillar box setup just like Ilan’s did. It would use a central box which housed the claw as well as two dowels with gears printed on the ends that would allow those to move along the tracks at the top of the support pillars. Because I don’t trust the claws ability to move up and down I planned to have attached to a long screw similar to how the Ender 3 repositions the printing nozzle vertically. When you wanted to grab something it would raise the platform into the grabbing range of the claw, then another motor attached to the claw would tighten the strings used to close the claw and it would be able to grab the object. All told it would only require four motors, two for the horizontal motion, one for the vertical motion, and one for closing the claw. It would have five buttons, four to control the horizontal motion of the claw and a last one that raised the platform and closed the claw.
Closer than you think.
I had actually been working on this I got an Arduino kit called the Elegoo which came with a programmable chip and motors. Ultimately I wasn’t able to build this for several reasons. First the extra structure would have been pretty huge and added a lot of extra build time. Second I have no experience with electrical engineering and that would have been a whole other learning curve to get around. But I have many of the pieces and it may simply be something I work on in my free time.
Reflection
I wanted to challenge myself, I wanted to experiment with skills I hadn’t used before. To that end I think I was successful. I often struggle learning from books or tutorials and the decision to just explore the process as I went was a fun way to immerse myself in what I was doing a bit more. Exploring building physical structures through iterative design (constantly prototyping, playing around with the material) was very informative and a fun way to learn. It was also interesting getting to think of materials and structure in a more nuanced way, not just thinking of color and shape but also flexibility and smoothness and how different qualities effect the usability of the things you create.
I will also say it was very satisfying doing something so explorative in a physical medium. As mentioned before I tend to stick to all digital work, but there is something nice about working on a long build. It is very satisfying making progressive discoveries and watching the thing you make slowly take physical shape. It’s also nice that when you build stuff you retain all your prototypes you have a physical log of every design choice made and ever iteration. It gives the final product this very pleasant substantial feeling to it that you don’t get when all versions but the final version are erased as is often the case with say coding.
In regards to my final artifact, regrettably by it’s nature this was pretty outside of my wheelhouse of general interests. I might finish the frame and electronic extensions I wanted for the claw but following that probably keep it as a neat little curio. It was a fun exploration but I doubt I’ll do anything similar to this anytime soon.