Pretty much from the moment I saw this in class I knew I wanted to do something with motion. I like this idea of structures designed for motion, not just mechanical hinges but a flexible structure that is designed to fold and articulate. Of the ones we got to see during the presentation, I really liked this crab one. Mostly because it serves a dual purpose, when it moves it both pulls itself along but it also tenses its claws allowing to grab something. For my final project I want to focus on creating a moving structure that functions as a tool.
In terms of Deliverables, having looked into the creation of this particular design, there are a lot more moving parts that I first suspected. It’s almost constructed like a Lego with various segments responsible for different functionality. So I think reasonably I’ll probably only create one flexible claw. However that one design I expect to be pretty large, maybe a foot long, and I would like it to be able to hold some amount of weight (like at least a cup or similar).
As for a Timeline, I’d like to start experimenting with designs the week of November 3rd. For that week I want to explore types of flexible structures, whether it would be best to use a single solid form or multi part structure and see what would be most practical and functional for a final product.
On the week of November 10th, I hope to finalize the structure I plan to use for my final form and begin prototyping how the final build is going to move.
By the week of November 17th I hope to be well along in prototyping, and begin constructing my final build.
On the week of November 24th constructing the final build should be well under way along with general time to refine any problems I come across and general polish before presenting.
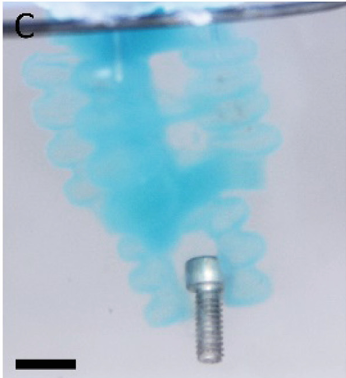
In terms of inspiration, I mostly dug into the works done by Morphing Matter Labs who were the group that originally worked on the crab design shown above. There were two papers FRESH-Printing of a Multi-actuator Biodegradable Robot Arm for Articulation and Grasping and PneuMesh: Pneumatic-driven Truss-based Shape Changing System that I really drew inspiration from. FRESH had an interesting structure that consisted of a single printed structure and uses hydraulics by pushing fluid through the structure to achieve it’s motion. PneuMesh on the other hand is the crab one, it is multi-part and relies on cables to achieve motion. They each provide different approaches to similar ends and I’ll be drawing on both when deciding how to create my final form.
Hello Beau! It looks like you have a really solid idea for what you want to do. Creating a moving structure would be very interesting and impressive. Your timeline looks manageable and thought through. I am very excited to see your progress with this idea!
Thank you. Since I’m pretty inexperience in engineering I wanted to focus on a practical project that I think I can manage successfully. Fortunately the papers I looked at are very transparent about their design process so I will have a fair amount of guidance going into my own construction.
Hey Beau! Your project on creating a moving structure sounds awesome but difficult, especially the flexible claw inspired by the crab design. It’s cool that you’re focusing on functionality as well as motion.
Your timeline looks solid, and I’m excited to see how your prototyping goes. Have you thought about what materials you might use to make sure the claw can hold weight? Looking forward to seeing your final build!
I have thought about the material somewhat. My primary concern for the moment is actually flexibility and making sure that the material I use has a good range of motion. To that end I was recommended TPU filament which I’m hoping to run some tests on shortly. I’m not too concerned about weight because I’m shooting for say a cup of pencils but it’s something I’ll definitely have to give more thought as the build progresses.
Hi! This is a super cool project and I am excited to see how it turns out! I am interested to see how all the moving parts work together to create the final result. I am curious if you are planning to do one arm with two pincers or two arms that act as pincers (similar to the image provided)? Good luck and hope it turns out great!
Thank you, my immediate goal is to try and reproduce something similar to the builds I’ve read about so I’m most likely going to try for the two arms acting together.
Beau,
So excited to see how your final project turns out, especially with the size constraint you gave yourself on it. Do you have an idea on how you want the flexible claw to look like? Or do you intend on recreating an object similar to the moving crab example but with more functionality? Also, will you be using your own printer for this or are you still exploring materials and possible services? Good luck! Sounds like an intricate but very doable project!